

堆取料机无人作业系统
智能堆取料无人作业系统,融合了基于数学模拟建模技术与快速激光扫描建模技术,实时获取料堆三维模型数据。
结合通讯与控制技术,利用高精度定位系统、料位雷达、防碰撞雷达、微波开关防碰撞系统,通过远程视频监控系统及空间防碰撞系统,对料堆三维图形和数据进行分析。
结合料场操作作业工艺控制策略,开发自动堆料取料执行控制程序,从而实现全天候的堆取料远程控制,与全自动无人作业,实现堆取料作业生产管理与操作作业的标准化、自动化。
系统实现全天候、主动安全防护的全自动化作业,有效解决散货料场堆取料作业存在的作业要求高、劳动强度大、操作员健康与安全隐患、流程效率较低、信息化手段较低等主要问题,提高料场生产组织与管理水平。
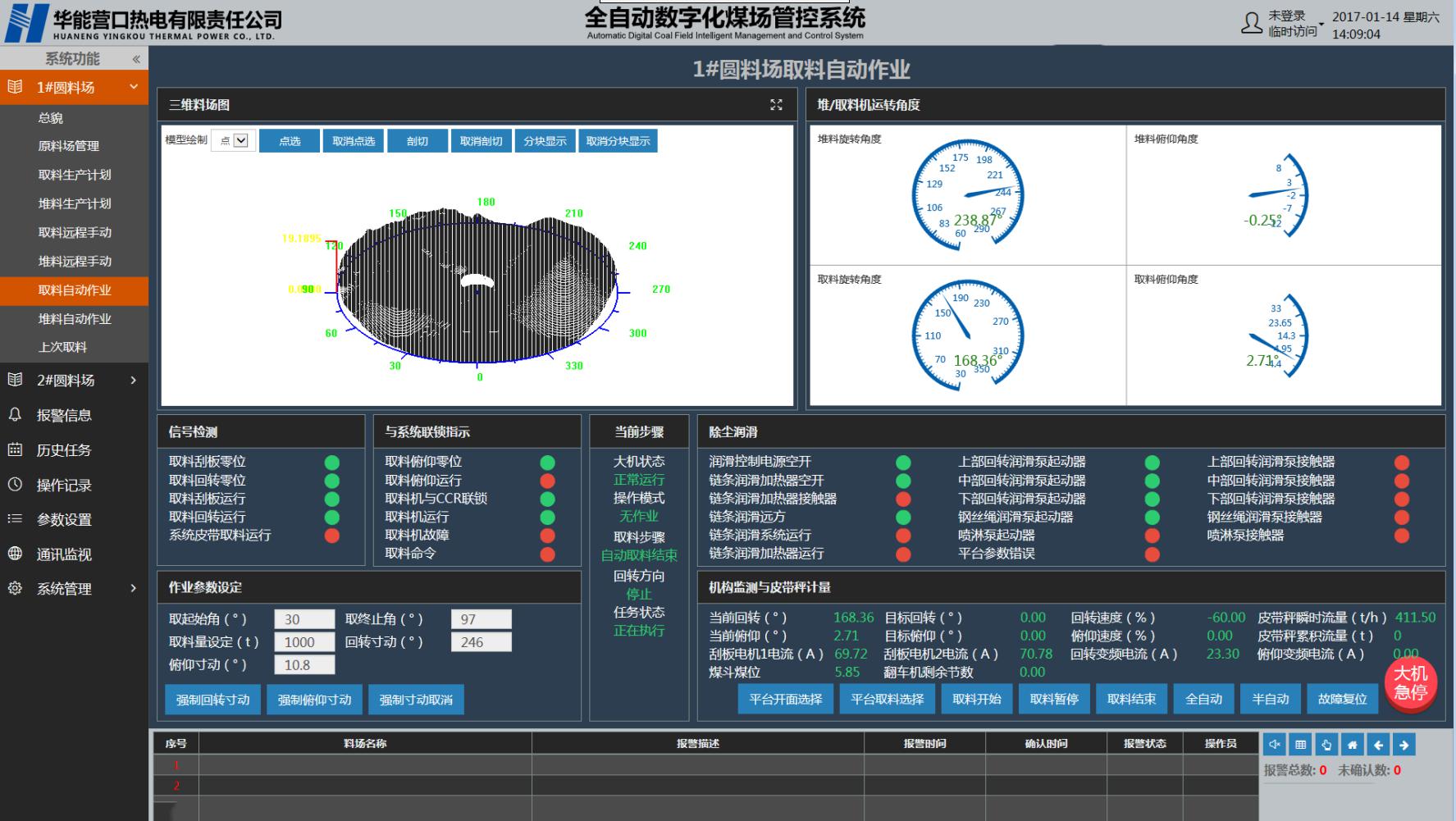
利用自主研发智能管控平台,将“HMI”与”3D虚拟交互“相结合,把“料场三维可视化管理”、“自动堆取料操控”与“单机作业信号监控”技术方案融合一体,实现一个平台完成料场数字化管理、无人化自动作业与设备状态监控。
创新融合数学模拟建模与快速激光扫描建模方法,实现全自动实时料堆三维建模。彻底解决堆料发生踏跺、临时攒垛、清垛、多机交叉作业、雨雪、大雾等特殊工况下无法自动作业的技术难点,达到了全工况下自动智能堆取料无人作业。


系统包括:堆料与取料全自动作业操控,智能巡护盘料,料场3D可视化管理,堆料与取料作业计划管理,取料流量控制,多重安全防护、报警信息查询,操作记录等主要功能。
采用智能一体化操控平台;可靠的多层软硬结合作业安全防护保障;多维融合性料堆建模技术;采用目标流量闭环控制算法,实现取料作业精准稳定;采用先进的图形与数据分析方法;作业任务“数字化”与“透明化”;实现料场作业动态全过程3D可视化管理;利用智能识别技术实现作业全程的全自动;与料场盘料有机结合,降低成本。



